
近年来,我国煤炭需求逐年增加,加上多年的安全投资债务,导致矿山事故不时发生,给人民生命财产造成严重损失。 瓦斯爆炸事故对矿难事故的危害最大。 事故发生时,救援专家由于缺乏必要的现场环境信息,无法及时制定有针对性的救援计划; 救援人员进入事故现场进行调查救援,往往需要长时间的强制通风,从而延误了宝贵的第一次救援时间。 因此,有必要开发一种实用可靠的搜救机器人,以取代救援人员在第一时间进入地下执行搜索任务,并将搜索信息反馈给救援人员。 该研究对提高煤矿事故应急救援能力、减少伤亡和救援决策具有重要意义,也为机器人技术的研究、应用和推广开辟了新的领域。
1 搜索多机器人系统的工作原理
本文建立了基于无线传感器网络的境信息监测、人员搜索定位、远程通信等问题,建立了基于无线传感器网络的搜索探测多机器人系统。 该系统由功能强大的母机器人和几个子机器人组成,以母机器人为越障和探测主体,小型子机器人作为沿途的通信和监测节点。 机器人系统要有效穿越障碍物,到达危险灾害现场,收集(气、火、水) 将信息传递给井外救援人员,需要重点关注机器人系统的越障能力、通信能力和传感能力。
多机器人系统的地下搜索探测主要针对四种地形环境: 普通粗糙地面; 与机器人车身相比,障碍物较高; 上下甚至左右都有障碍,只有一个狭小的开放空间; 与机器人车身相比,裂缝较长。 前两种障碍要求机器人具有较强的地形附着力,履带式机器人比轮式机器人更有效; 单个履带移动机器人通常体积较大(横截面) 它也限制了它进入狭窄的空间,跨越更大的裂缝。 因此,需要建立一个由各种履带结构和多关节体组成的母机器人,提高机器人穿越障碍物的能力,提高整个系统进入巷道的速度; 同时,子机器人采用两轮独立驱动和弹跳足,减少体积,便于部署,具有一定的局部越障运动能力,构建传感器网络,调整整个网络的性能。
整个机器人系统解决了穿越障碍进入巷道深处的问题。 同时,母机器人携带并配置子机器人作为无线通信节点,构建多跳通信网络,为地下通信搭建强大平台。 通过中继节点无线通信,子母机器人不仅可以进一步扩大探测距离,还可以通过节点机器人的传感功能动态监控巷道环境的变化。 如图1所示。
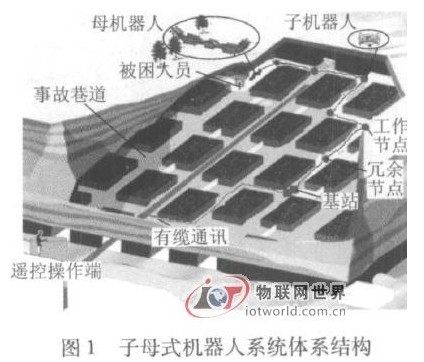 矿井事故多机器人系统
矿井事故多机器人系统