自古以来,人类的各个方面都离不开定位技术,从古代的远洋航海罗盘到现在的每一个电子终端GPS,定位技术无处不在。然而,人类已经演变成生活在钢筋混凝土森林中的动物,在室内工作和生活的时间远远超过室外,室内也需要定位和导航。目前市内定位技术主要分为RSSI感知定位、RTLS实时坐标级定位和惯导定位。
RSSI感知定位技术
基于RSSI定位技术主要包括:有源RFID,ZigBee,WiFi、蓝牙iBeacon等等,他们的共同特征是2.4GHz基于场强信号强度检测和指纹采集(采集多位置信号强度参考值)的感知判断,获得相对位置,但无定位坐标。
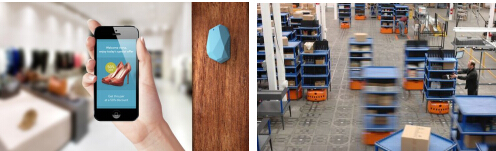
值得一提的是,目前比较iBeacon阵营,采用BLE技术,定期发送的通知帧,支持BLE可以通过模块与接收器之间的距离接收设备m参考接收信号强,接收器根据参考RSSI计算发送模块与接收器之间的距离与接收信号的强度。基于RSSI定位技术产品的应用市场主要针对普通人的定位和商业消费定位,如家校学生管理、医院老年人管理、商场消费群体定位等。
实时无线电定位技术(RTLS)
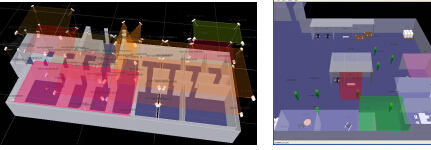
上面的RSSI感知定位技术没有定位坐标,不能满足高精度坐标定位的需要,RTLS(实时定位系统)技术应运而生,实现无线电测距计算、时差计算、角度计算等定位。主要定位算法有:TDOA(到达时差定位),AOA(角度定位),TOA(到达时间),TW-TOF(双向飞行时间),NFER(近场电磁测距)等。其中UWB频段(超宽带无线电频段,6-8GHz)由于脉冲波和带宽的高特性,被发现非常适合定位,定位精度高,不易干扰,尤其是Ubisense该公司创造性地推出了世界上第一套UWB定位系统,UWB定位系统被世界各行各业应用。
2013年底,爱尔兰一家也在积极研发定位系统Decawave该公司正式启动DW1000 UWB提供射频芯片UWB定位核心基础部分后,唐恩科技、南京沃旭、清研讯科、无锡真源、深圳广等国内公司推出了低成本UWB定位系统,但目前DW1000芯片良品率不到60%,时间计算不稳定,配套能力不足导致国内衍生产品不稳定,大部分产品在项目中无法实际使用。

惯导定位技术
通过陀螺仪、加速度计等运动传感器的组合,惯性导航系统实现单终端无基站定位。整合计算运动传感器的信息,通过为惯性导航系统提供初始位置和速度,不断更新当前位置和速度。 惯性导航系统通过检测系统的加速度和角或向西运动)、速度变化(速度大小或方向)和姿、速度变化(速度大小或方向)和姿态变化(绕各轴旋转),不需要外部参考点的特点,自然不受外部干扰或欺骗。
陀螺仪用于在惯性参考系统中测量系统的角速率。通过以惯性参考系统的初始方向为初始条件,对角速率得分,可以随时获得系统的当前方向。这可以想象,被蒙住眼睛的乘客坐在车里,感觉汽车左转、右转、上坡和下坡。根据这些信息,他知道汽车在哪里行驶,但他不知道汽车是快是慢是慢。
加速度计用于在惯性参考系统中测量系统的线加速度,但只能测量相对于系统运动方向的加速度(由于加速度计与系统固定并与系统旋转,因此不知道自己的方向)。这可以想象成一个被蒙上眼睛的乘客在汽车加速时向后挤压座位,汽车刹车时向前倾斜,汽车加速上坡时向下按压座位,汽车从座位上弹起。根据这些信息,乘客知道如何加速汽车,即向前、向后、向上、向下、向左 或向右,但不知道相对地面的方向。
通过跟踪系统当前的角速率和运动系统测量的当前线加速度,可以确定系统当前线加速度。以起始速度为初始条件,应用正确的运动方程,对惯性加速度进行积分,获得系统惯性速率,然后以起始位置座作为初始条件再次得分。惯性导航系统传感器的小误差会随时间积累成大误差,误差一般与时间成正比,需要不断修正。现代惯性导航系统采用各种信号(如全球定位系统、磁罗盘等)进行校正,采用控制论原理过滤不同信号,确保惯性导航系统的精度和可靠性。
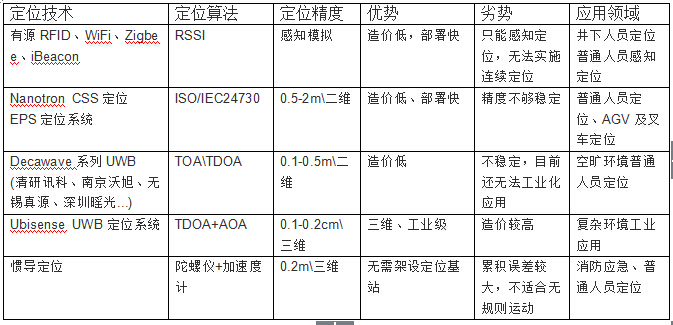
统计各定位技术的优缺点: